
服务热线 028-66666646



设备简介
机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。

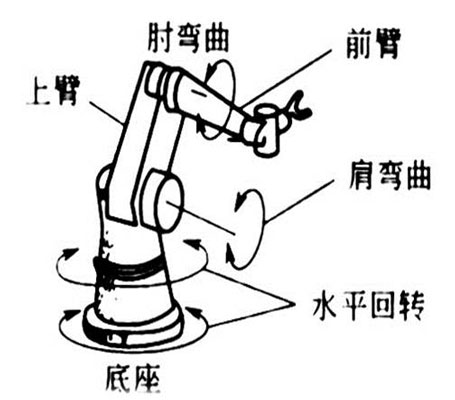
设备简图
关节型机器人主要由回转和旋转自由度构成的,可以看成是仿人手臂的结构。
从肘到手臂根部的部分称为上臂,从肘到手腕的部分称为前臂。
这种结构对于确定的三维空间上任意位置和姿态是最有效的。它对于各种各样的作业都有良好的适应性,缺点是坐标计算和控制比较复杂,而且难以达到很高的精度。
应用方案介绍
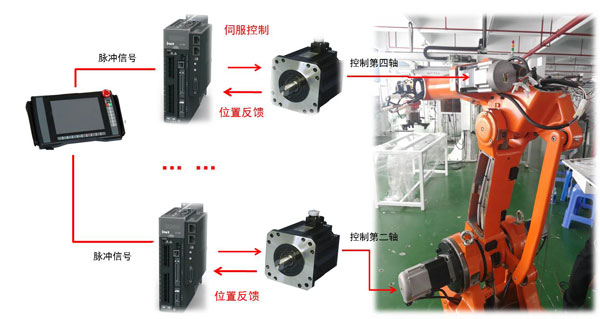
电气拓扑
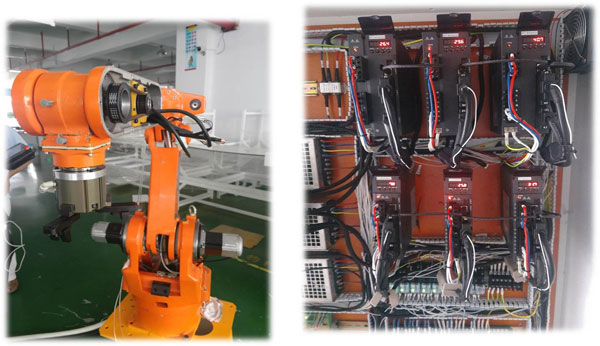
电气配置

方案总结